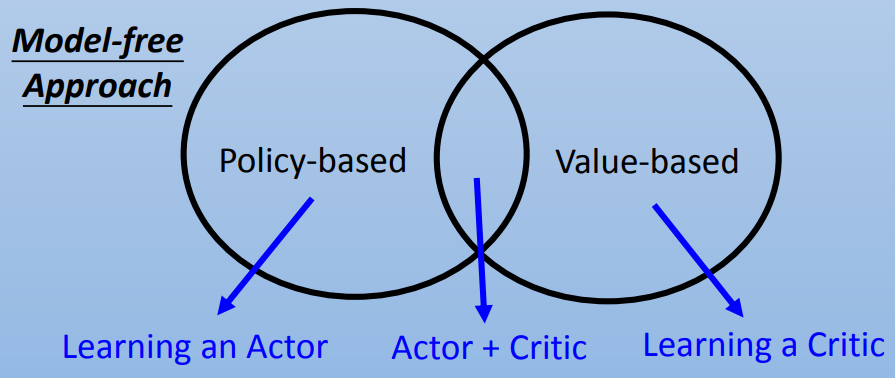
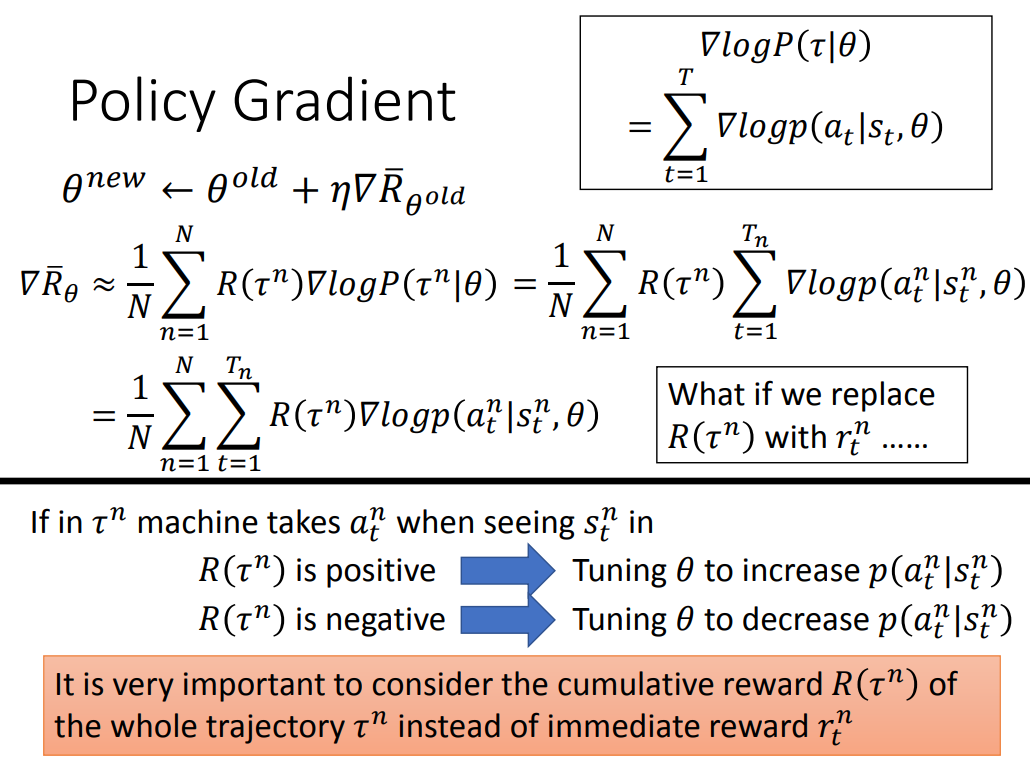
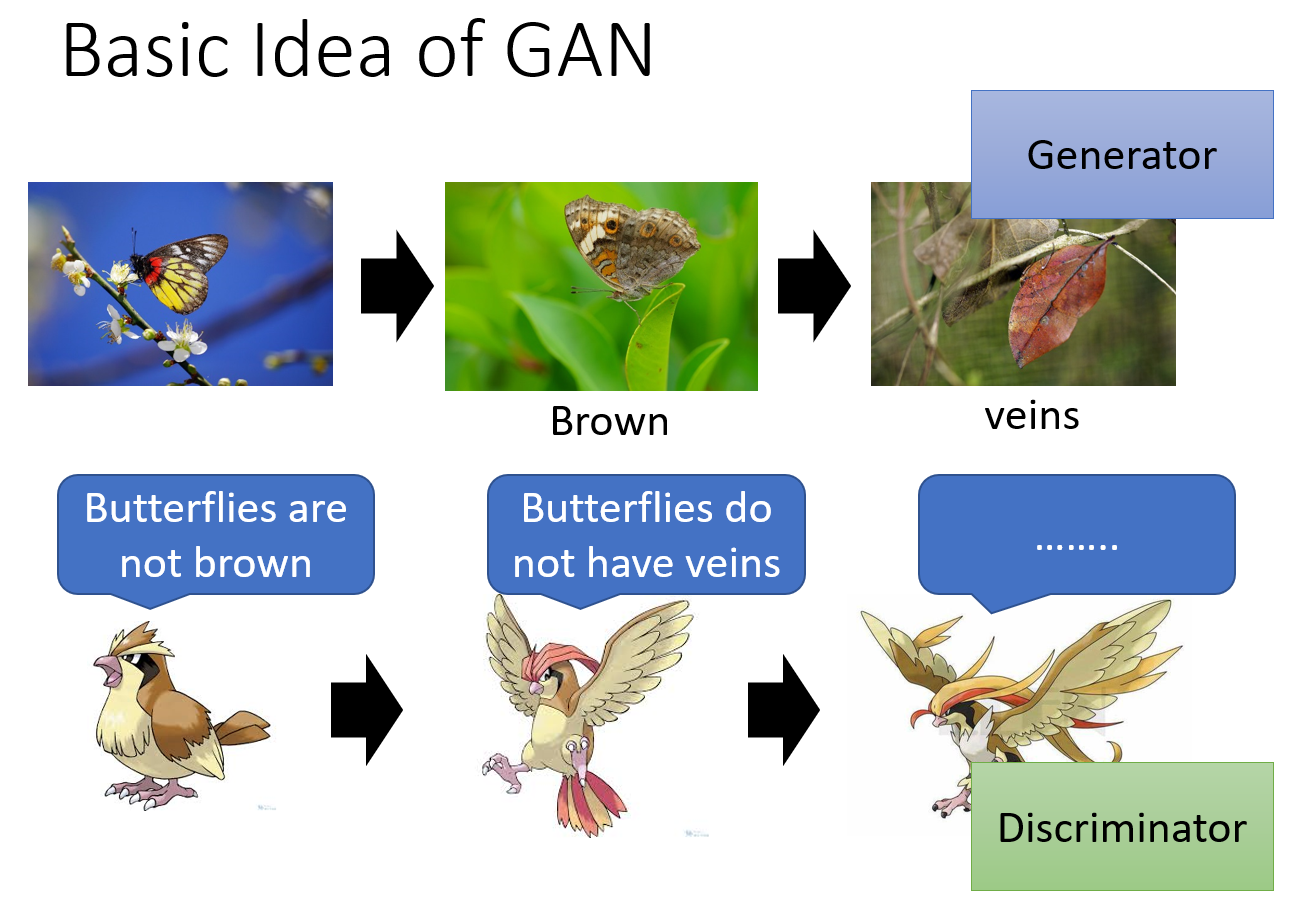
物竞天择,万物一同进化,一同内卷。Generator 和 Discriminate 一同训练和进化,此乃 GAN 的核心。
为什么我们需要输出一个分布(distribution)
对于吃豆人这样的游戏,假如说我们要用一帧游戏画面去预测下一帧游戏画面,如果我们使用最传统的网络,接受一个确定的输入,然后输出一个
确定的结果,那么可能会出现如下的情况:
这是因为对于训练集中的不同数据,可能存在一帧画面完全相同,但是下一帧的画面相反(一个怪物向左,一个怪物向右)。模型为了获得最低的损失,
会倾向于输出既向左又向右的叠加态。
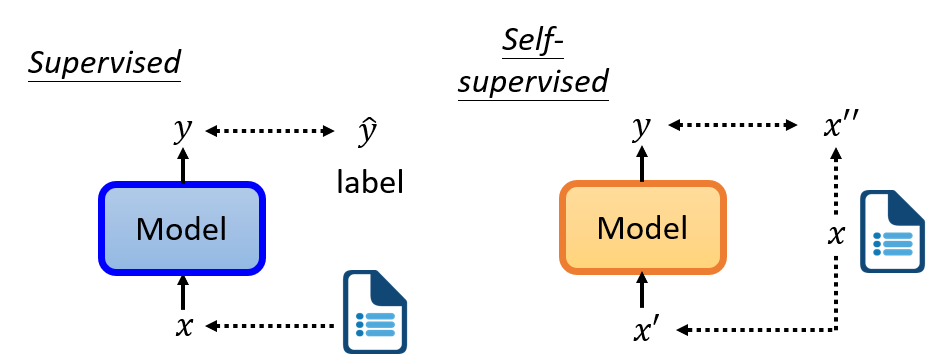
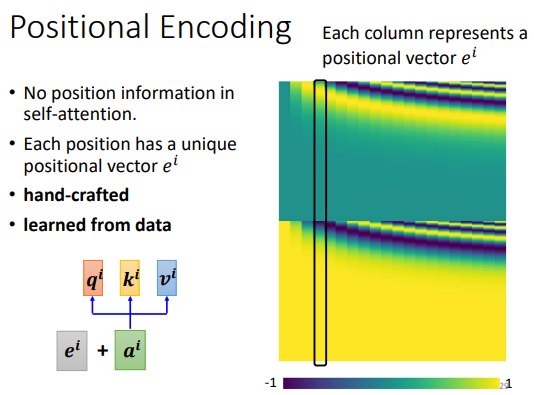
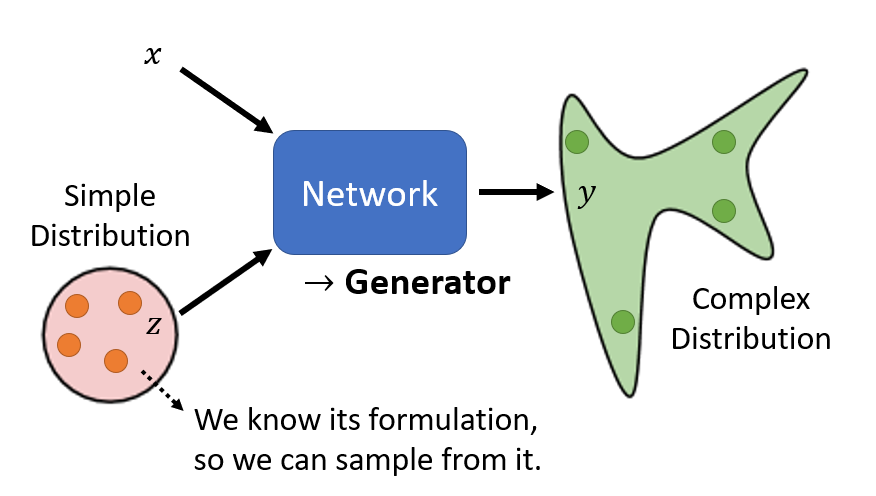
本质上这是因为我们输出的是一个固定的值/矩阵,而不是一个分布。假设我们输出的是一个分布,那么我们可以在输入的时候也加上一个分布 z(见第一张图),
来对应到输出的分布y。这样我们就可以用不同的输入分布来对应各种可能的情况:怪物向左,向右,向上,向下,死亡,存活。
本质上,这样的 Generator 适用于需要创造力的场景。
Unconditional Generation
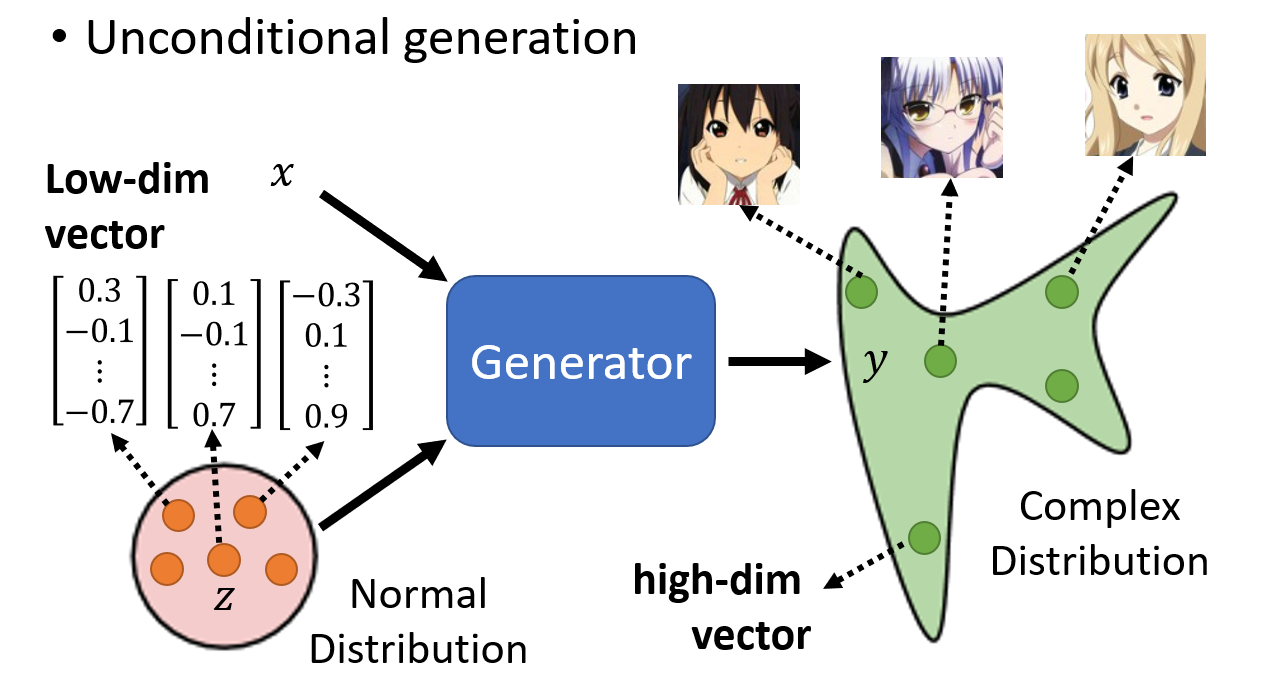
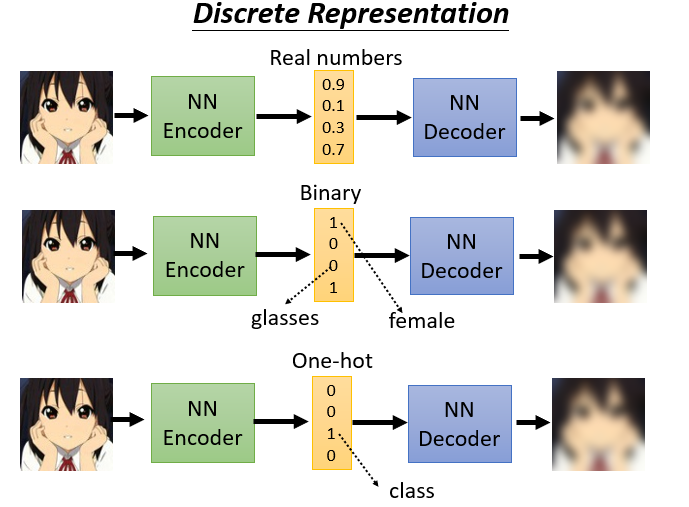
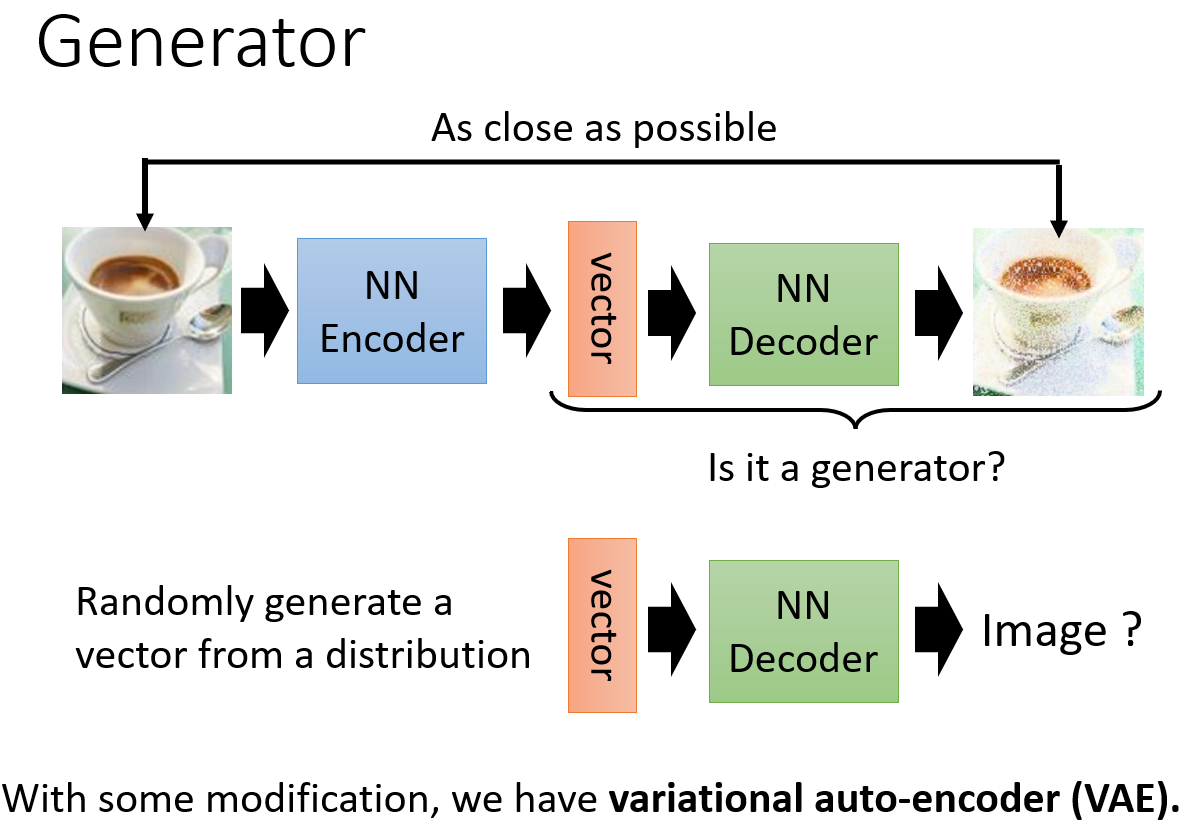
这里输入的分布可以是已知的,简单的分布,比如 Normal Distribution,网络会想办法生成一个复杂的分布。这个分布也就是一个高维的向量,
经过整理之后就会变成输出的图像。
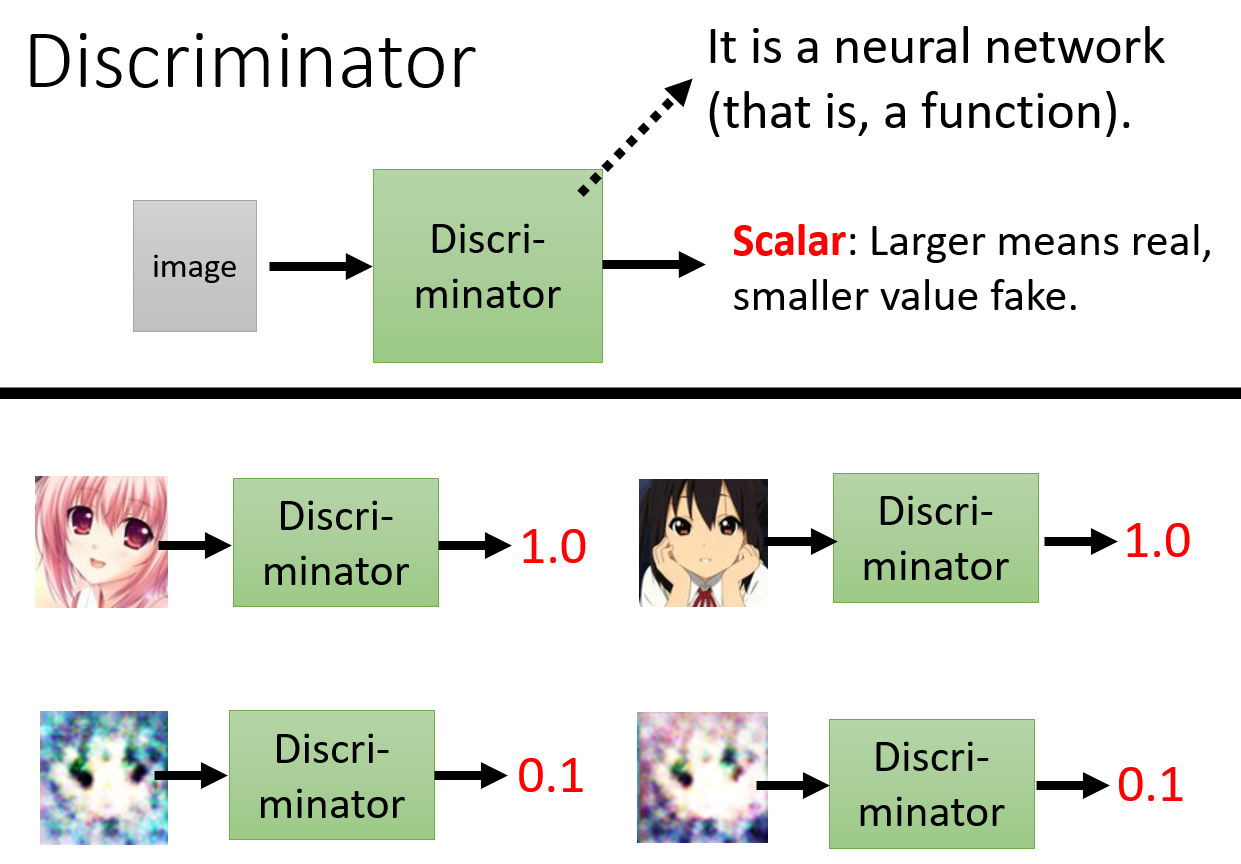
我们还需要一个 Discriminator。它会接受 Generator 输出的图片作为输入,并且输出一个数值表示该图片是否是真实的二次元图片。
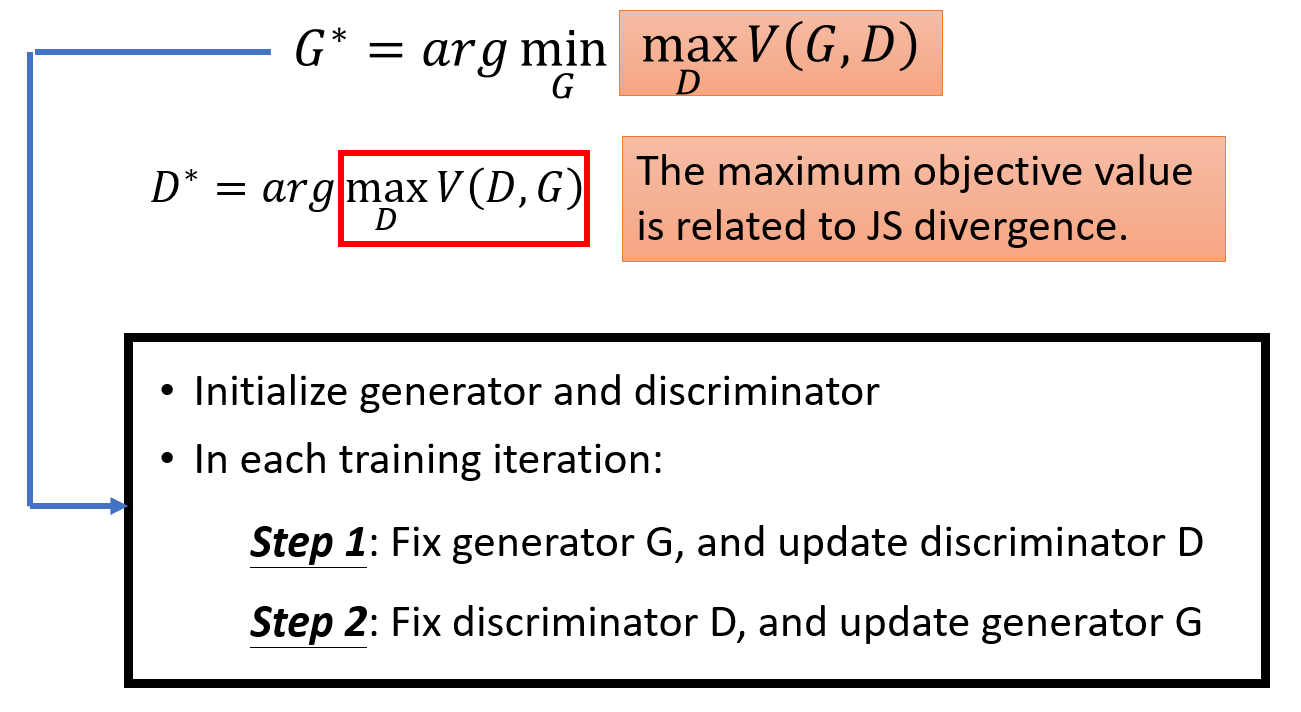
训练步骤
- 初始化
Generator 和 Discriminator
- 固定
Generator 的网络参数,训练 Discriminator,让它学会 “打假”:
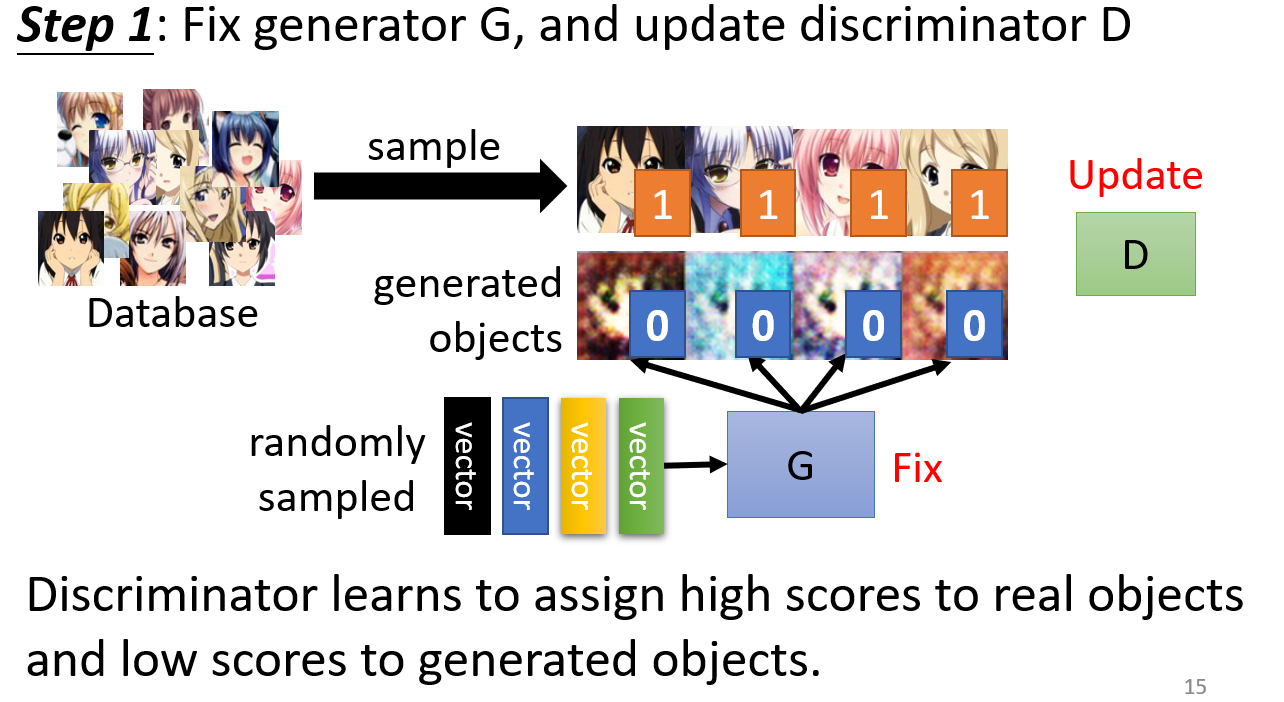
- 根据输入分布随机采样一些向量,经过
Generator 得到一些生成图片,这些图像是 虚假的二次元图像 标记为 0
- 从二次元图像数据集中采样一些图片,作为 真实的二次元图片,标记为 1
- 根据这些打好标签的图片,训练
Discriminator,本质上就是一个分类问题,训练一个 classifier。
- 固定
Discriminator 的网络参数,训练 Generator,让它学会 “造假”:
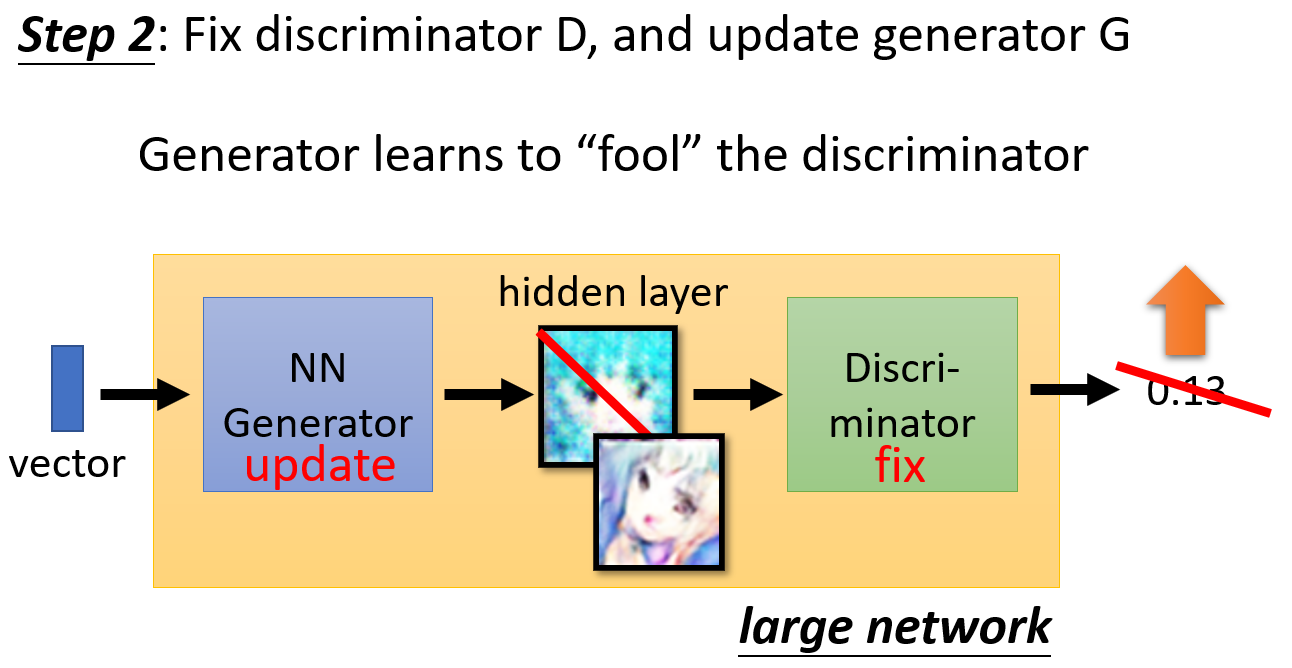
将 Generator 的网络和 Discriminator 的网络拼接,但是固定后者的参数。两者之间会有一个 hidden layer,将其整理就是生成的图片。
- 根据输入分布生成向量,传入
Generator,生成图片,由 Discriminator 生成一个分数(目标是这个分数越大越好)。
- 根据
Discriminator 的打分,训练 Generator。
GAN 的学习目标是什么?
我们希望 GAN 生成的分布 PG和真实的数据分布 Pdata 越接近越好(divergence 最小,即两种分布之间的某种距离)
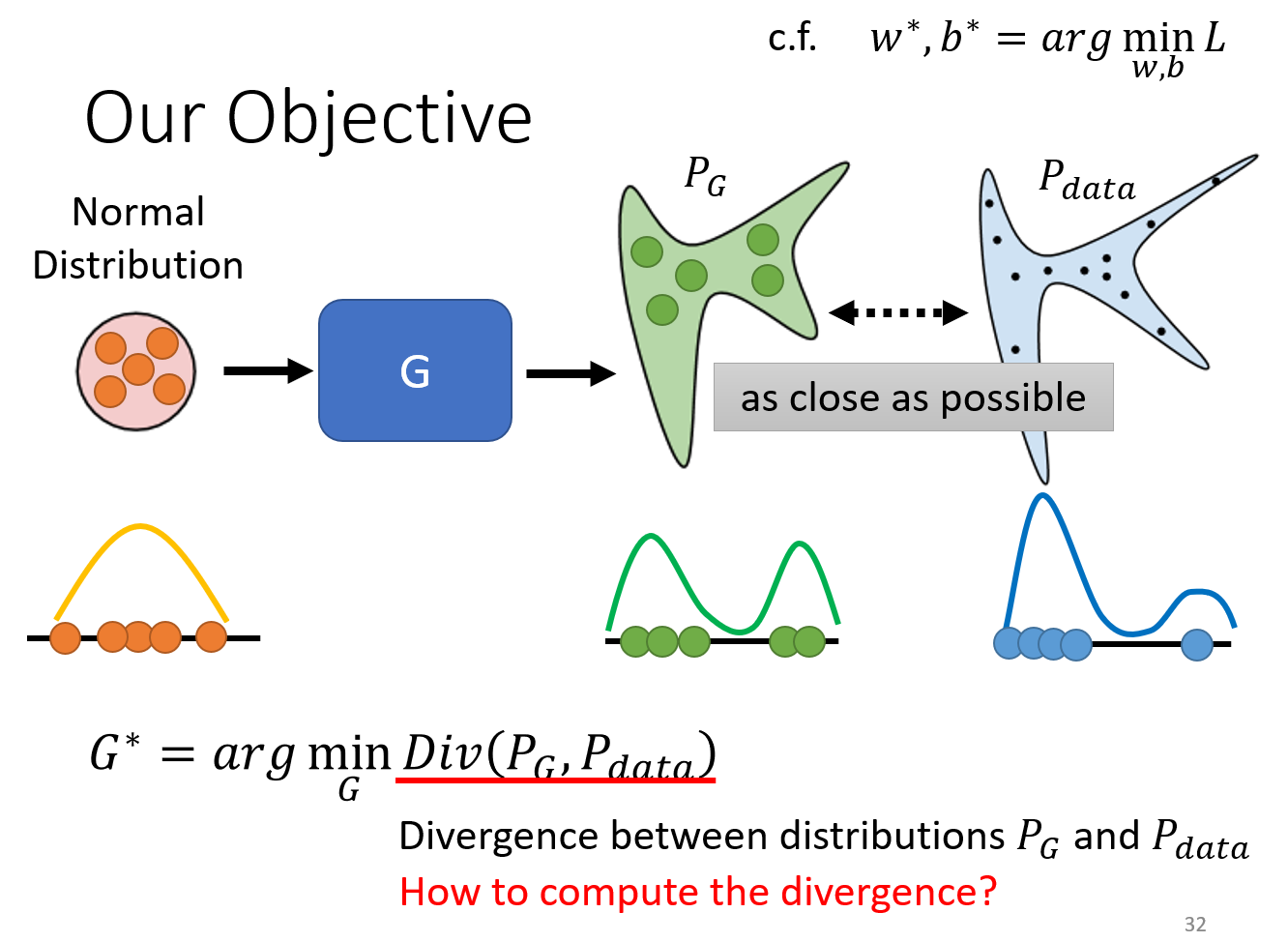
如何计算 Divergence?
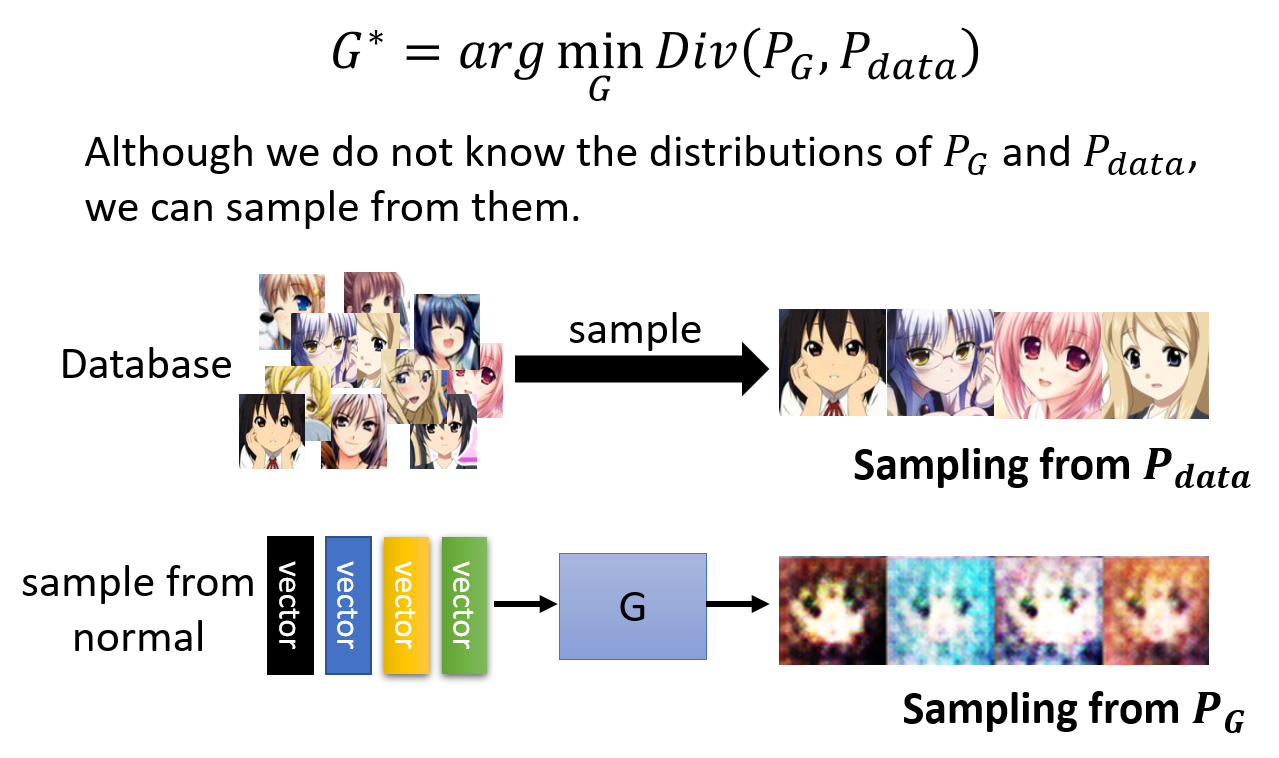
Sampling is good enough.
- 从数据集 sample 真实的图像,即对
Pdata 的 sampling
- 根据输入的分布 sample 出一些向量,通过
Generator 得到图像,即对 PG 的 sampling
在只知道 sample 的情况如何估算 divergence?
下图是对于 Discriminator 的训练目标,蓝色星星代表真实数据的分布,橙色的星星代表生出数据的分布。我们的目标是让 Discriminator 能够区分两种分布。
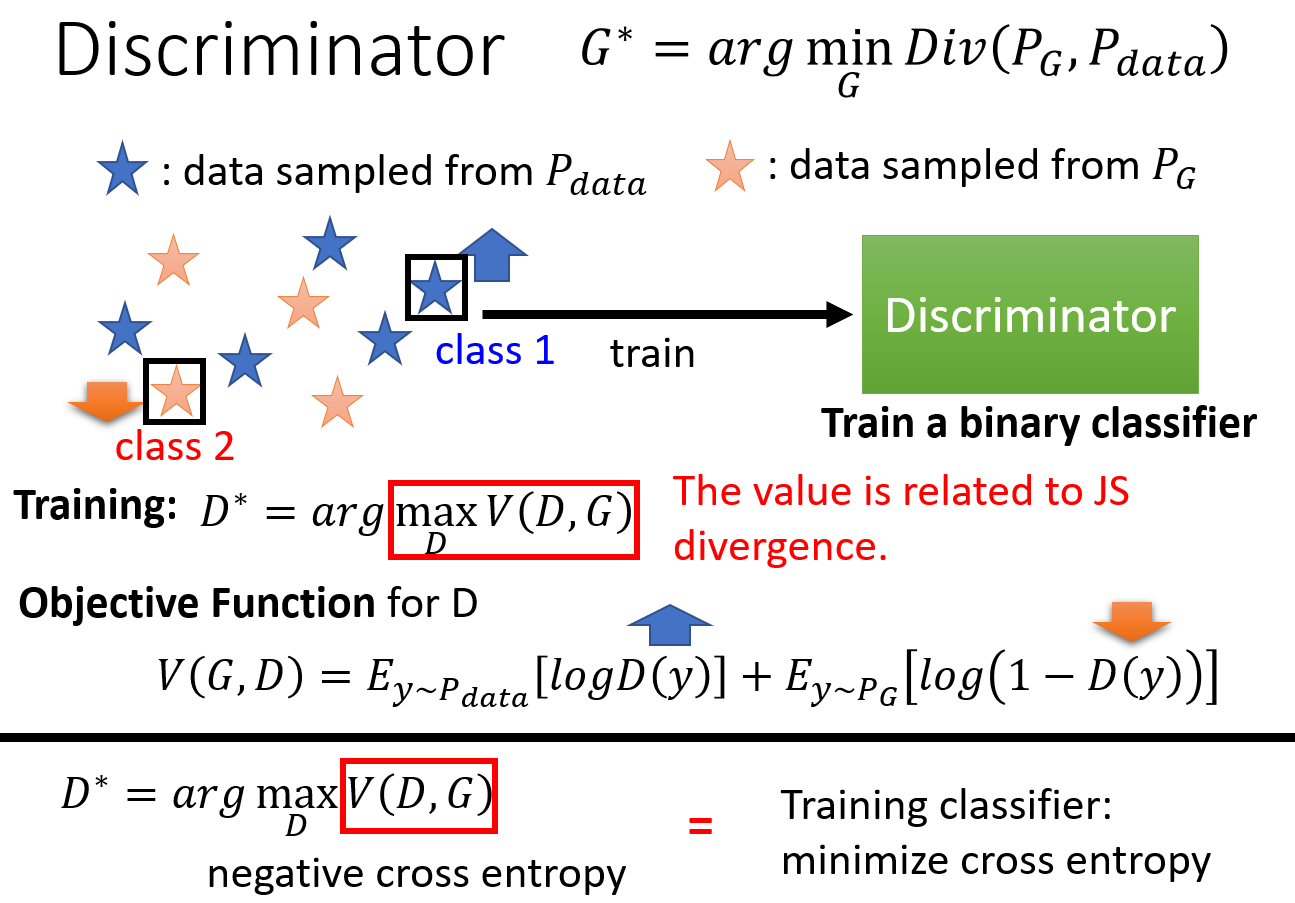
目标函数的左半部分代表我们希望由 Discriminator 生成的真实数据的期望分数应该越高越好,而生成数据的分数应该越低越好。损失函数可以是另外的形式,
这里是为了和二分类问题扯上关系。目标函数其实就是交叉熵乘上符号,也就是说我们要最大化目标函数,等价于最小化交叉熵。这与二分类问题的损失函数定义是类似的。
也就是我们在训练一个 Classifier。
JS divergence 不合适?
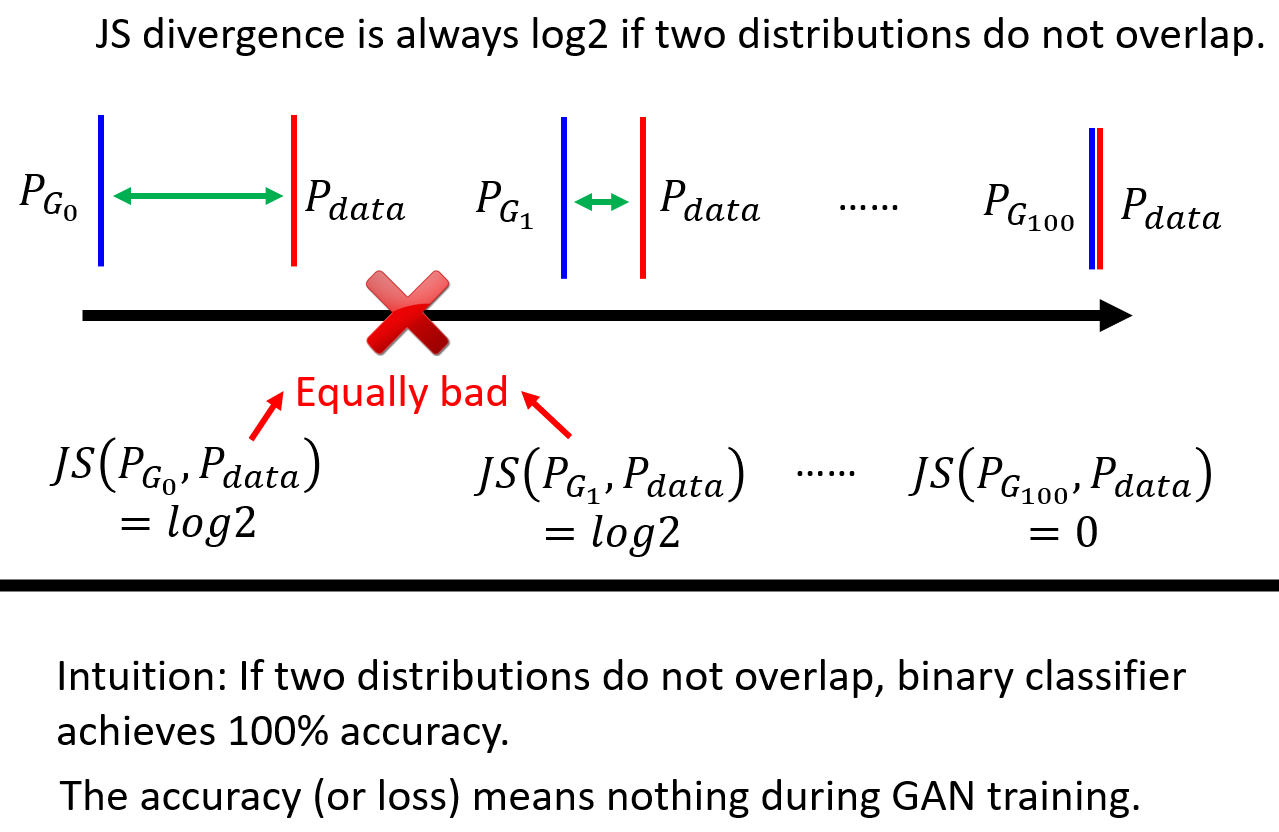
对于高维空间的两个分布(想象二维情况下两个直线),重叠部分几乎可以忽略不计。即使有重叠,如果采样数量不够,在 Discriminator 看来,两个分布依旧没有重叠。
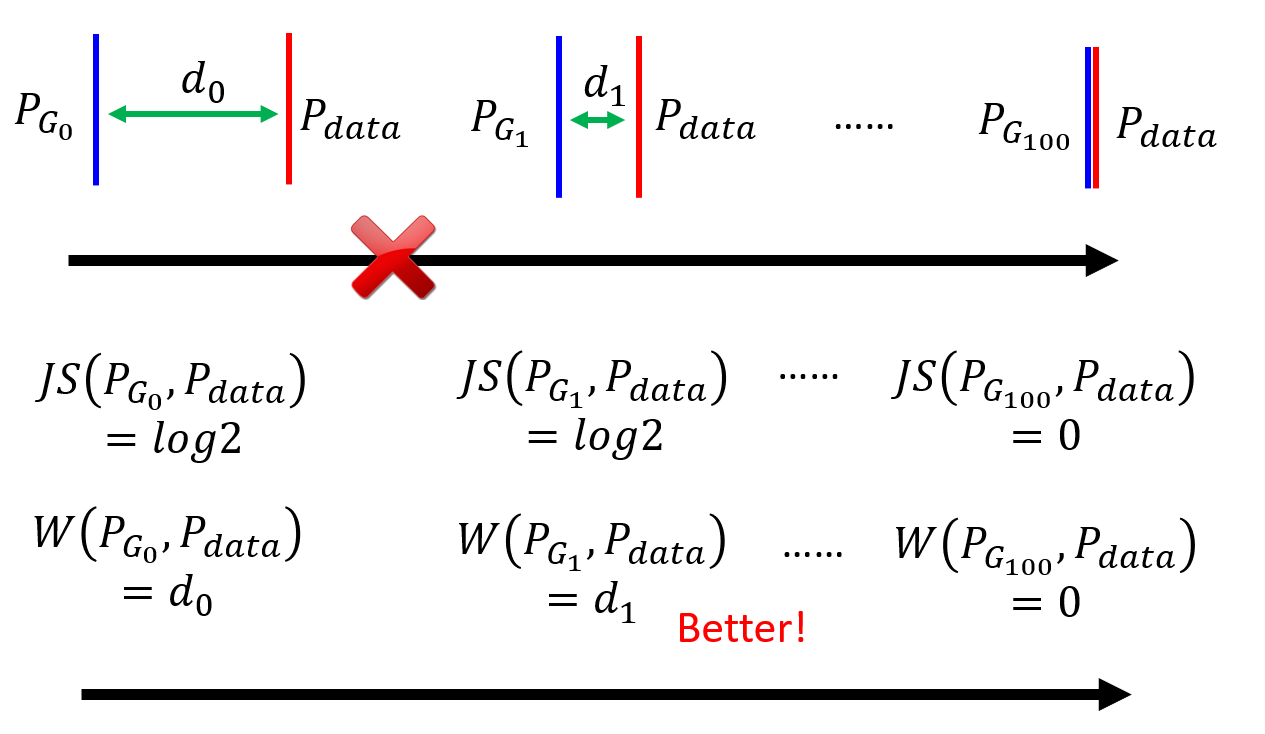
JS divergence 不合适的理由在于,对于两个无重叠的分布,JS divergence会变为一个常数:log2,这将导致梯度消失,无法从 JS divergence 中获取两个分布的距离信息。
因为无论训练出来的分布和真实分布有多近,如果两者没有重叠的话,JS 散度永远是常数,也就无法由此来更新网络参数了。
(有关 JS divergence 可以看这篇文章:GAN:两者分布不重合JS散度为log2的数学证明 )
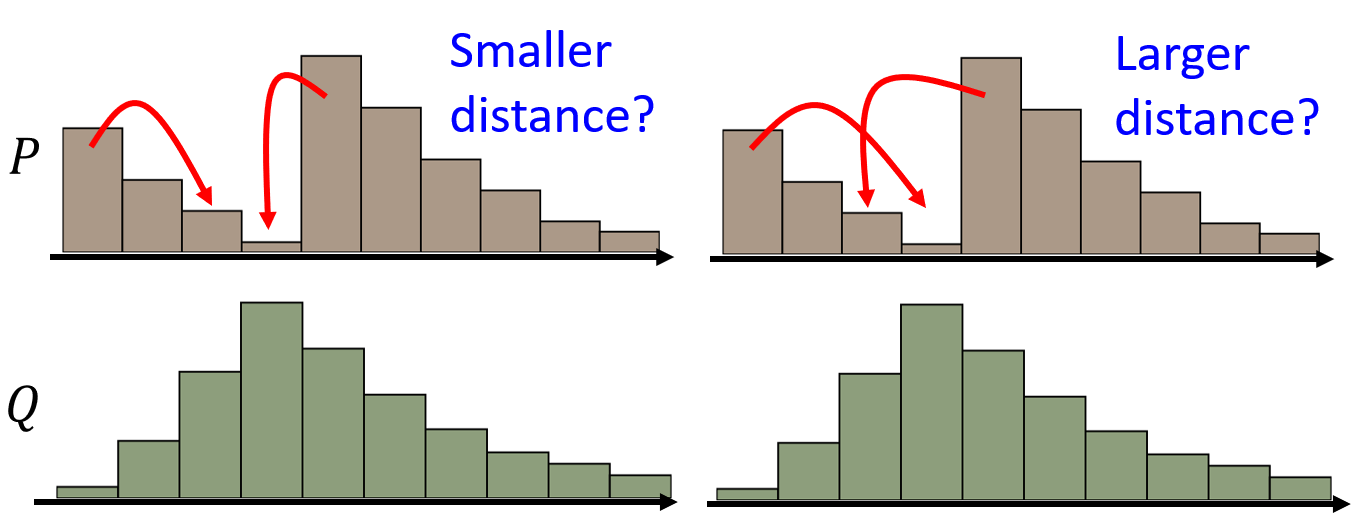
Wasserstein distance
可以通俗的认为将一个分布变为另一个分布所需要的代价。分布就像是一堆堆土堆,然后用挖土机将一堆土堆变为另一堆土堆的模样的消耗,即为 Wasserstein distance。这本身也是一个优化问题,
穷举所有的 moving plan,看哪一个可以获得最短的平均距离,这个最短平均距离作为 Wasserstein distance。
解决了 JS divergence 的缺陷:
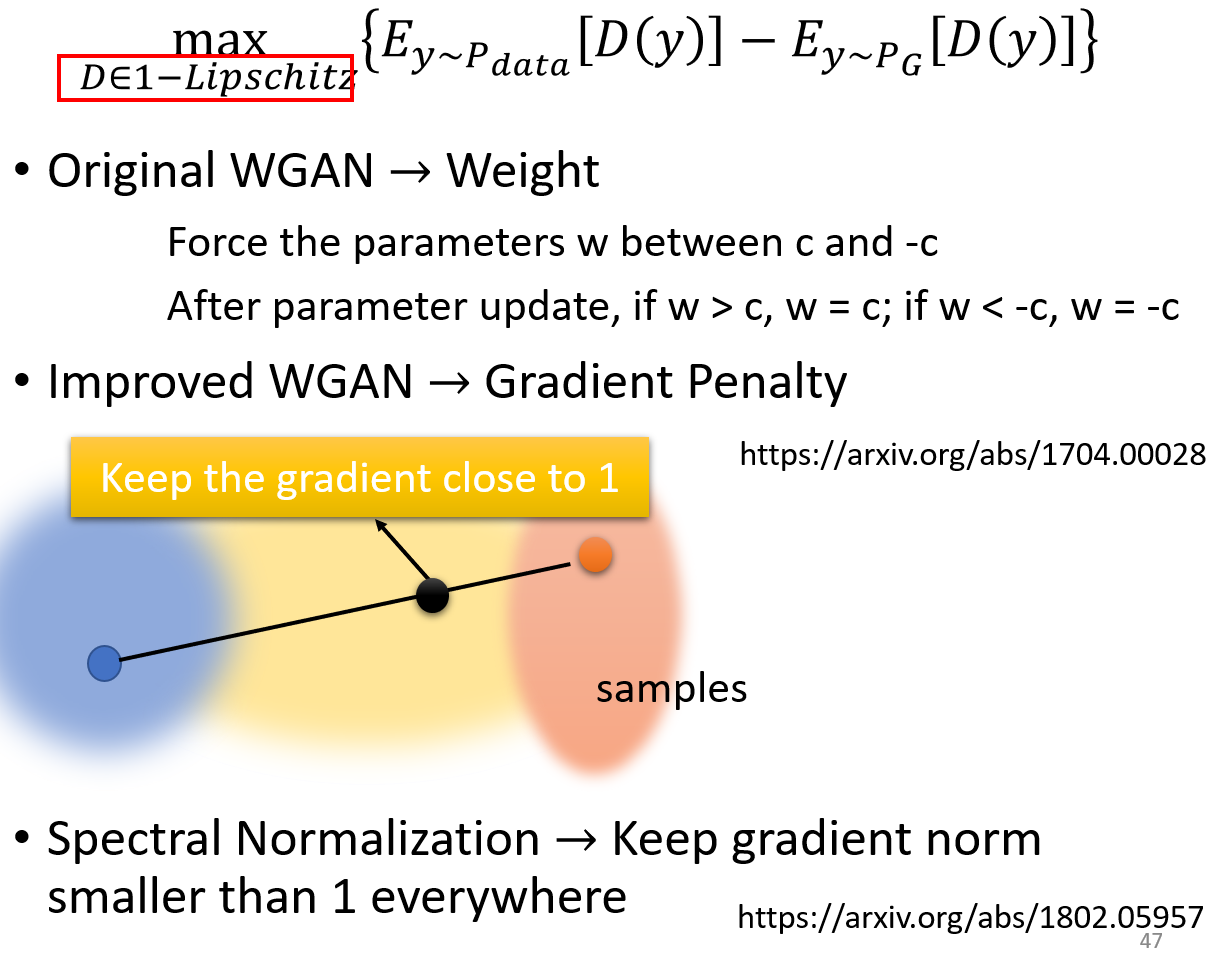
WGAN
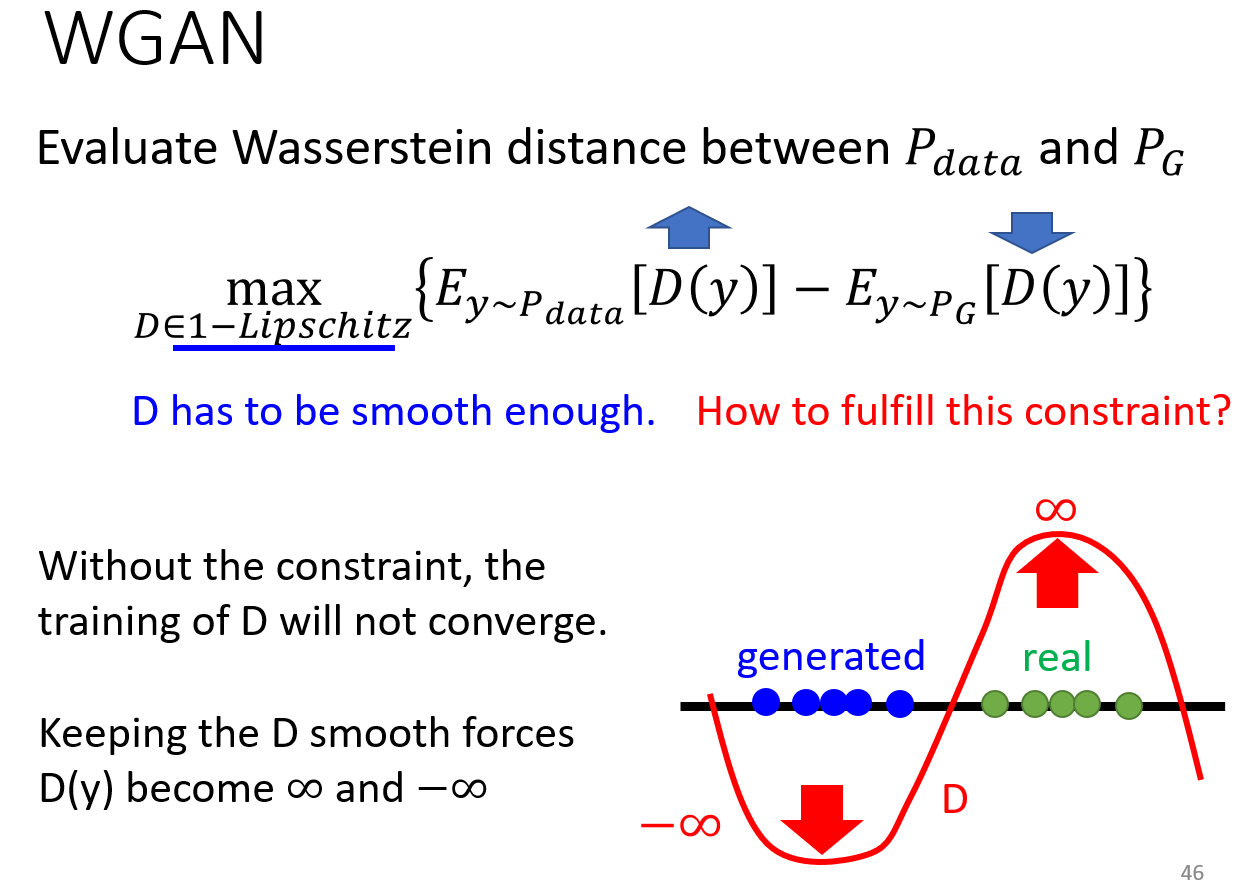
计算 Wasserstein distance,D 必须是平滑的函数,避免值剧烈变化,导致生成的分布和真实分布轻微偏离就产生无穷大的值。
WGAN 这篇论文其实也没有找这样的函数(比较困难),而是将 Wasserstein distance 限制在 [-c, c] 之间(c 为常数)。
GAN 存在的困难之处
难以训练:
GAN 是训练两个模型,一旦一个模型的训练出了问题,另一个模型也会出问题。也就是两个人一直在卷,卷到一半对手开摆,你也开摆!
各种训练的 tips:
难以做序列生成:
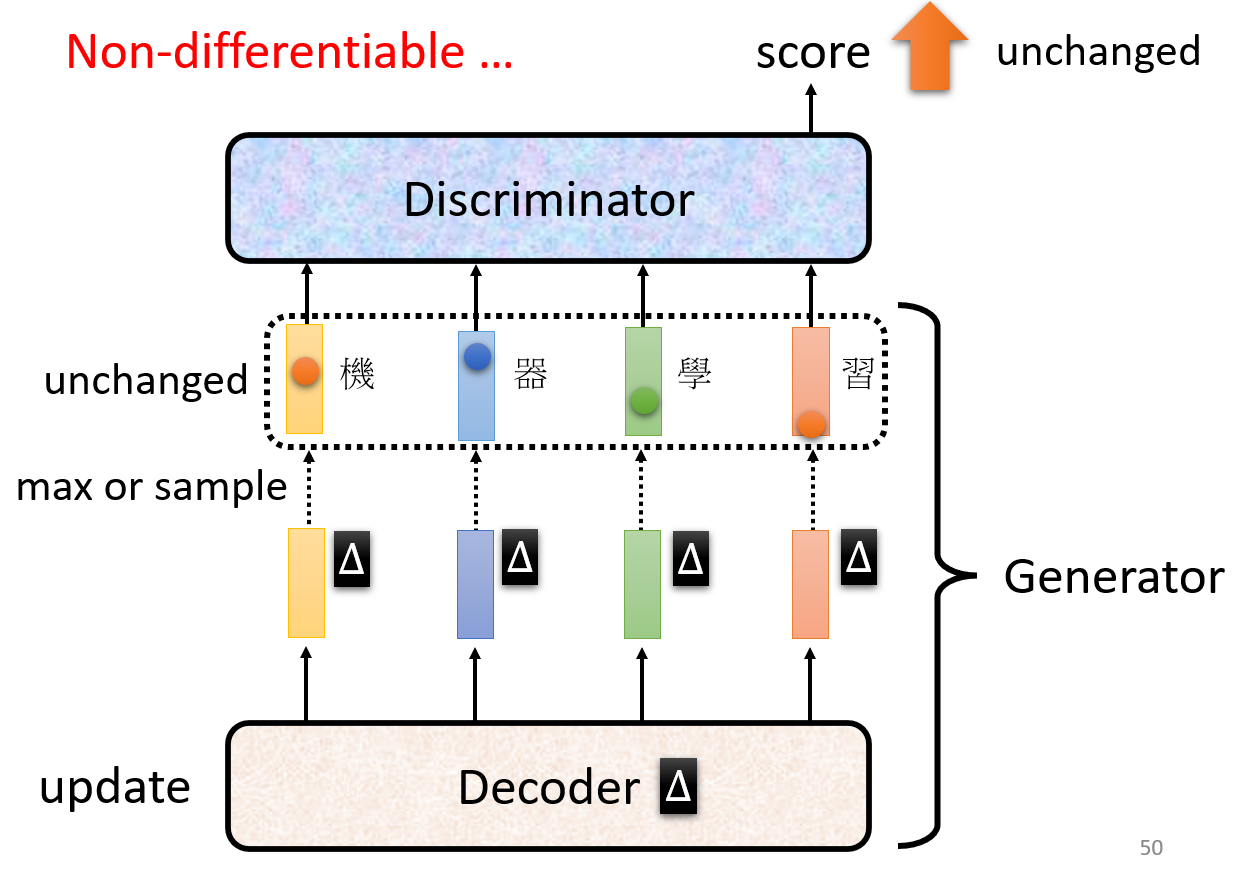
Generator 的参数变化会导致输出向量的微小变化,但是由于输出的是一个概率分布,概率分布的微小变化不会显著影响取到最大值的那一维度,也就是微小变化可能不会导致输出词汇的变化。
导致 Discriminator 无法进一步学习(梯度消失!)。
Mode Collapse

Generator 发现生成某一个特征的图片可以永远骗过 Discriminator,于是它就倾向于一直输出类似的图片。
Mode Dropping

多样性的丧失。
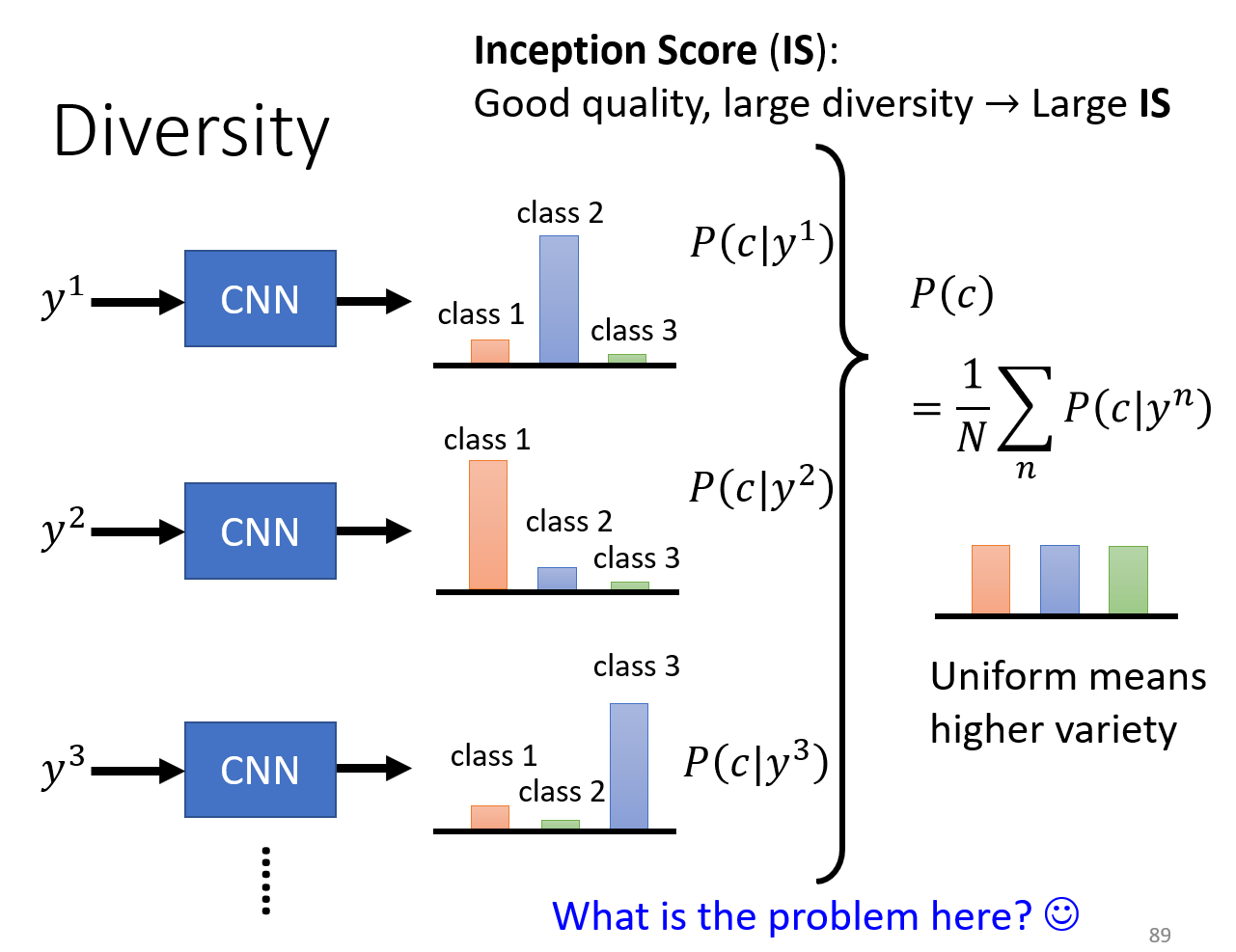
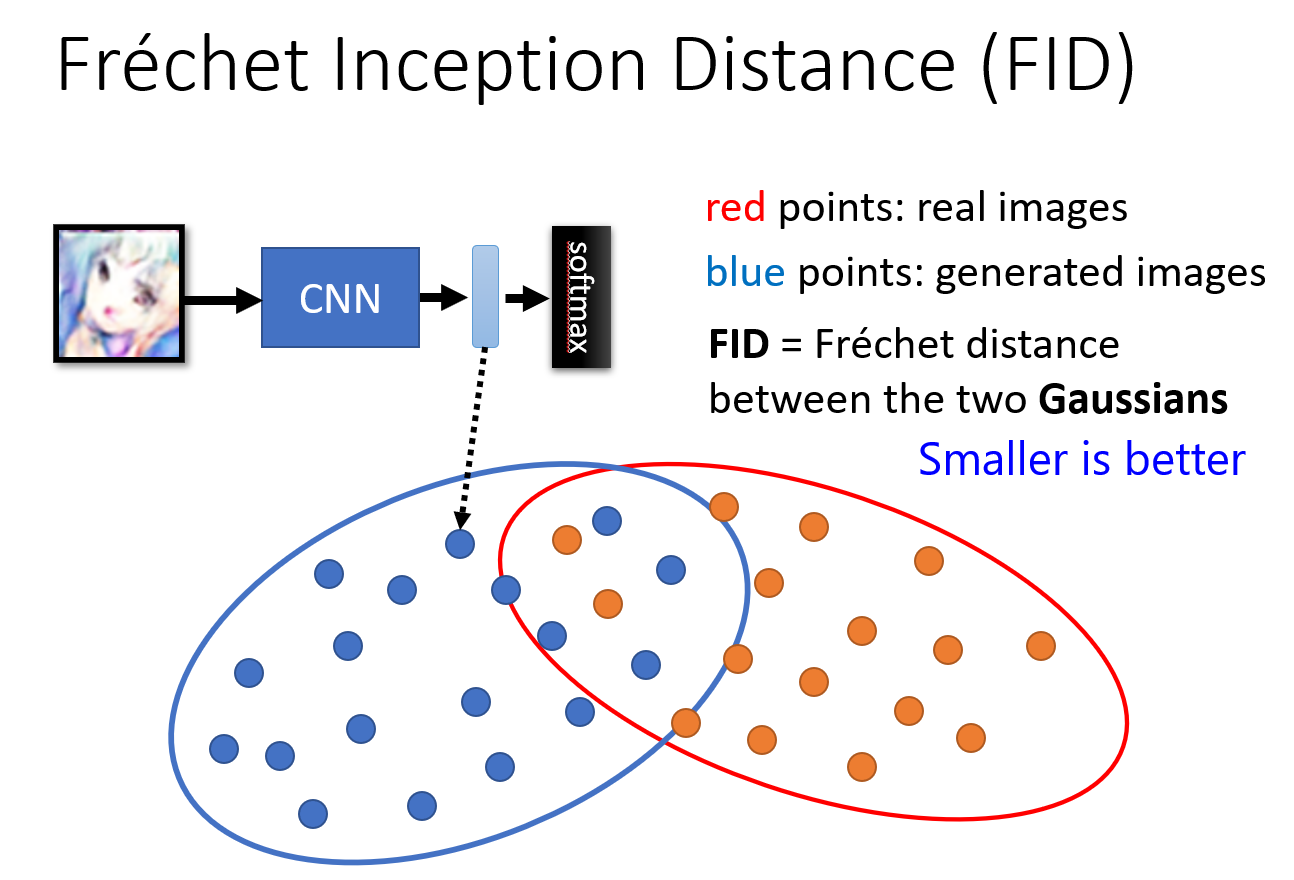
GAN 评估
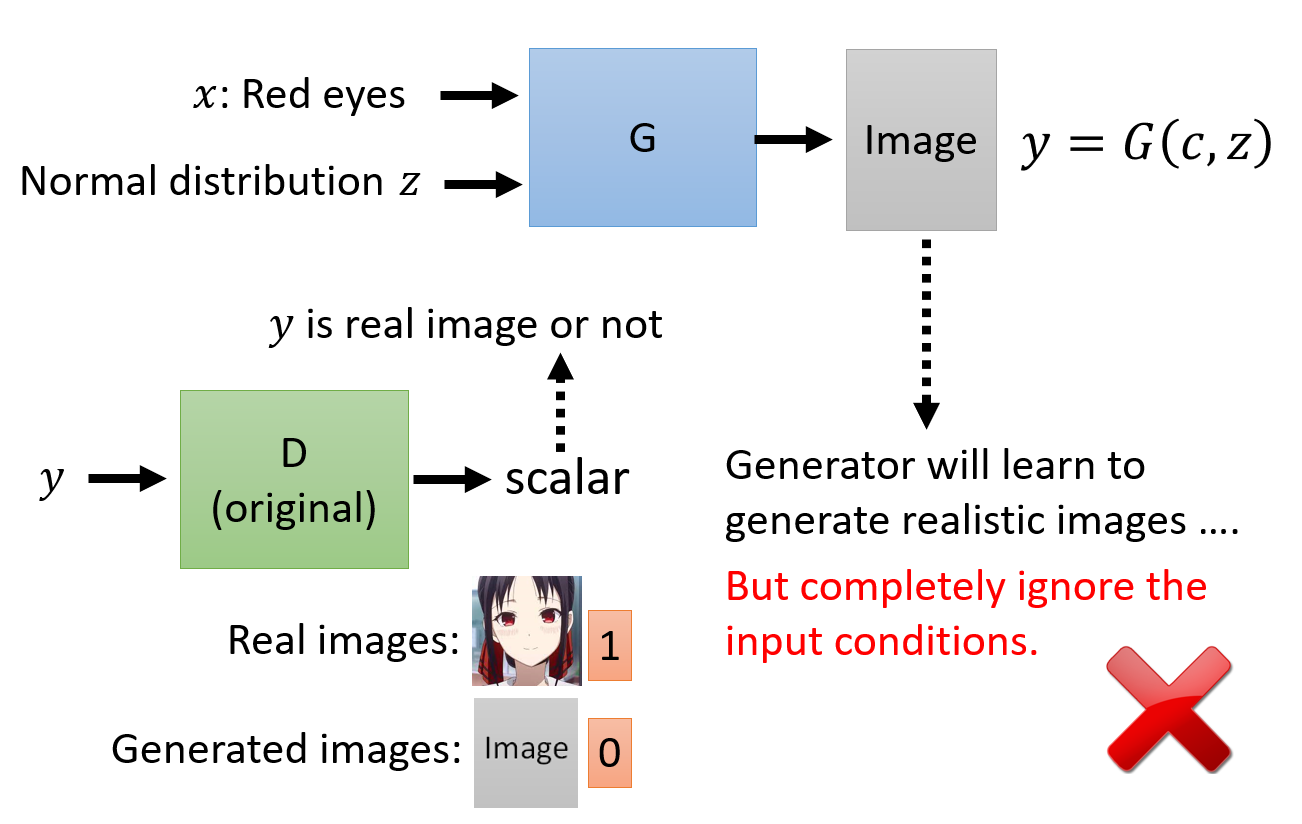
Conditional Generator
我们无法使用之前无条件生成的架构,因为 Discriminator 只是在学习如何打假,而没有学习生成的图片是否满足给定的条件。
需要如下图所示的成对训练资料:
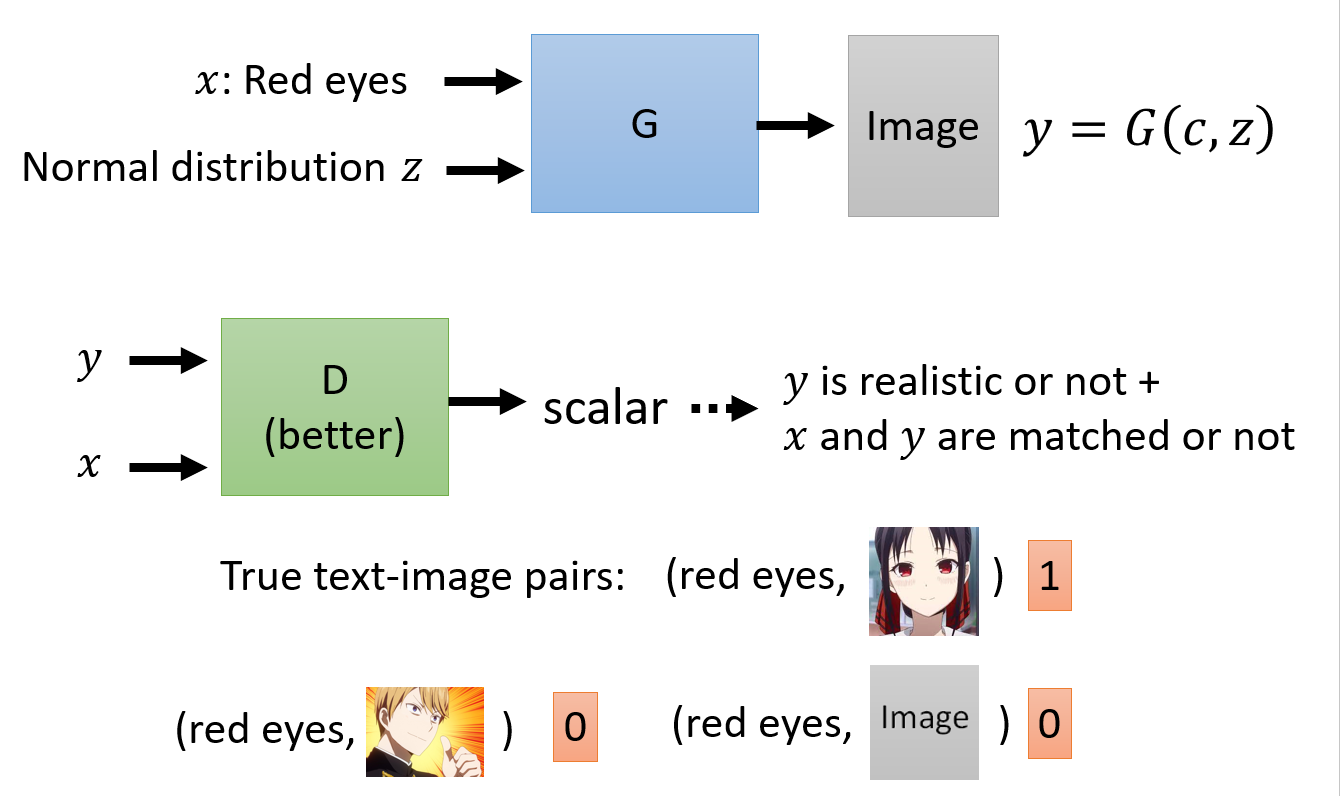
不同于之前无条件的情况进行“打假”,将所有训练集的数据都标注为真,生成的都标注为假,这里还需要选中一些训练集的数据(不满足给定条件),标注他们为假。
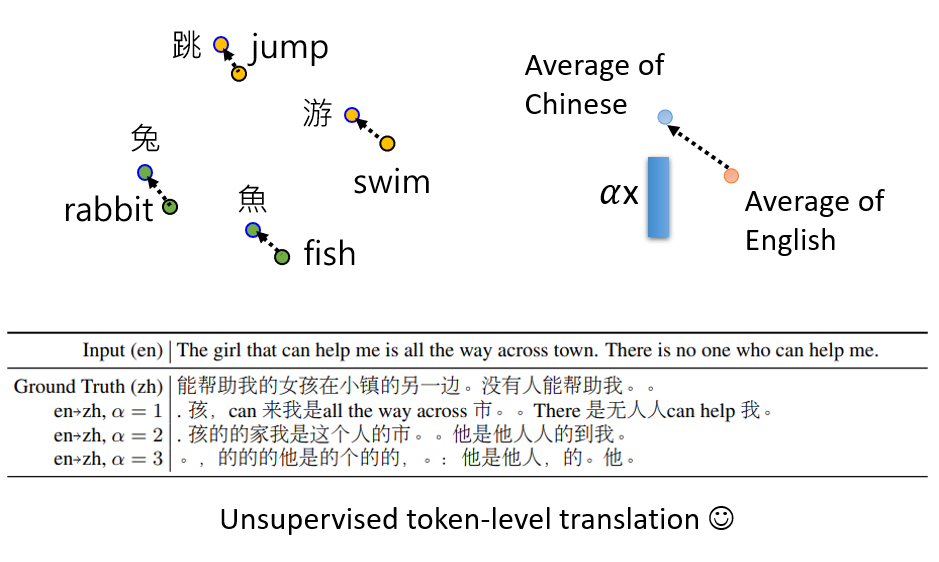
CycleGAN:GAN 与无监督学习
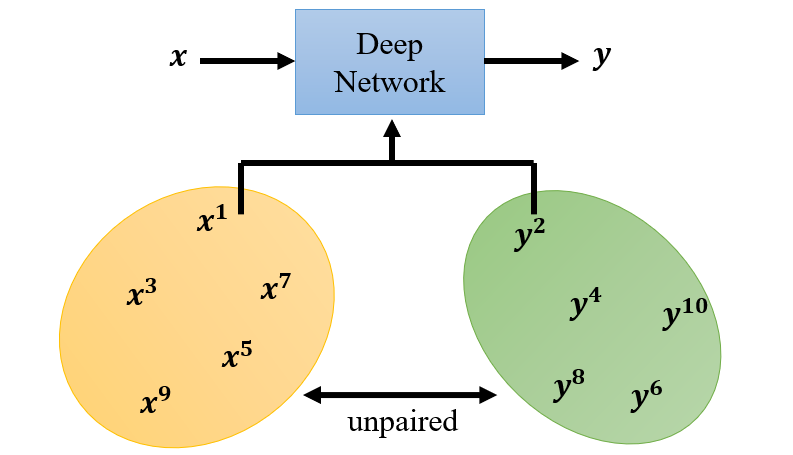
对于这种风格变换的类型,我们很难找到成对的训练资料。但是我们可以用 GAN 处理这种类型的问题。
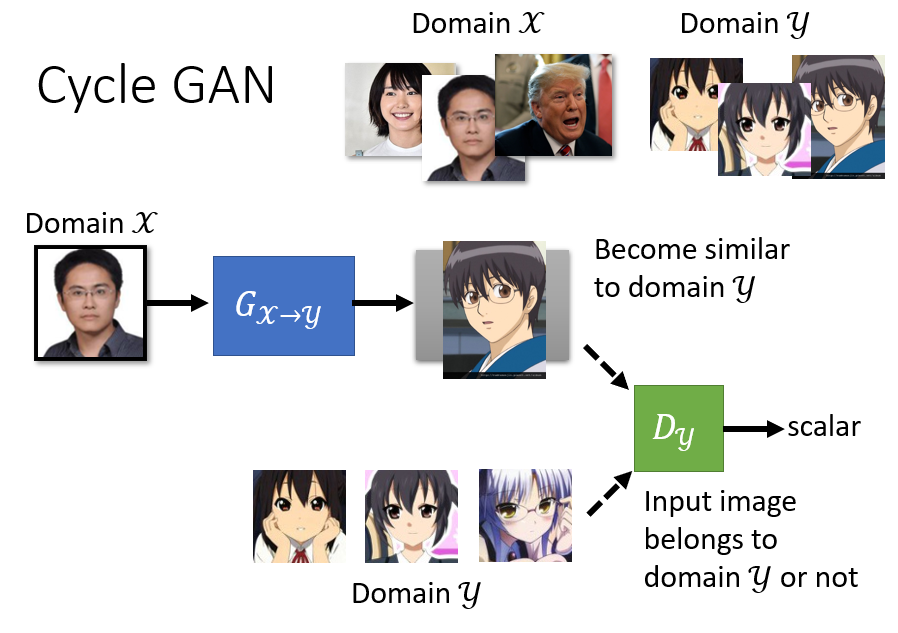
和原先 GAN 训练方式类似,之前是从高斯分布中 sample 一个向量出来,现在则是从 Domain X 中 sample 一张图片。然后将这张图片输入 Generator,
然后获得生成的风格变换的图片。这些图片和真实的图片作为训练集来训练 Discriminator,和之前的训练方式也是类似的。
但是这样可能会产生模型忽略输入而产生不相关图片的现象(反正输出二次元图片就能高分,那我干嘛要管输入的三次元图像)。
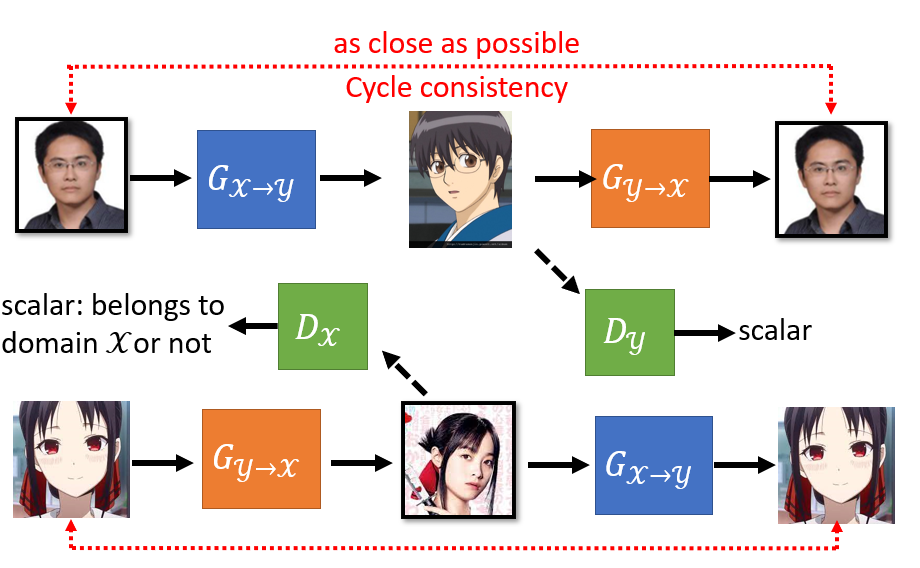
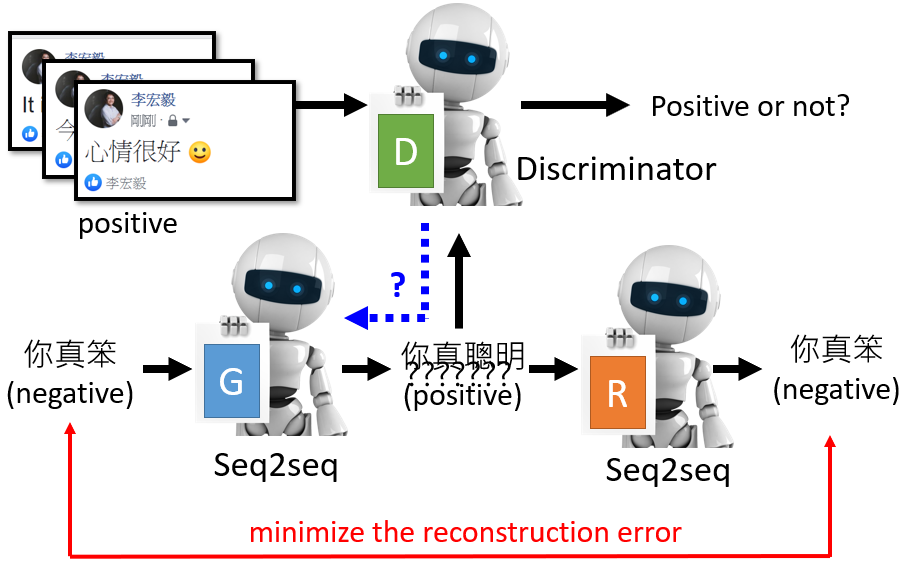
CycleGAN 通过两个 Generator 解决了这样的问题:一个 Generator 生成目标图像(即风格变换后的图像),另一个负责将这个目标图像变回原图。
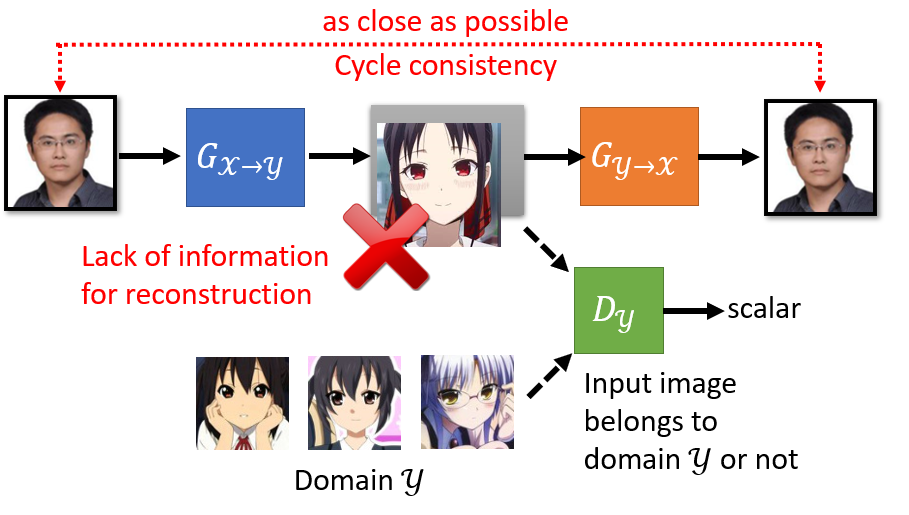
通俗来讲,就是第一个 Generator 负责将三次元人物变成二次元纸片人;而第二个 Generator 负责将这个生成的二次元纸片人恢复成原来的三次元人物。
这样就构成了循环,也就是 CycleGAN 名字的由来。这样的循环的好处在于,假如说第一个 Generator 无视输入的原图的特征,而生成一些毫不相关的二次元图像,
那么第二个 Generator 就很难将其转变回原来的图像(因为丢失了很多原图的语义信息)。这样就会产生较大的 loss,对这种行为进行惩罚。
虽然说 Gx->y 和 Gy->x可能串通一气,前者和后者都将图片镜像翻转,这样后者依旧能恢复出原始输入图像。但是一般实际训练的时候,第一个 Generator 就会生成和原图比较像的图片了(不会做复杂的变换),
所以 CycleGAN 在实际应用中很少会发生上述的情况。
你也可以训练一个双向的 CycleGAN: